


























 |
 |
 |
 |
 |
 |
 |
| Caratteristiche | Acquisto | Ricambi e accessori |
Guida al volo |
Documentazione | Tecnica | Altre risorse |


Questo modello di JXD è disponibile in quattro varianti: con sistema FPV basato su smartphone (con sigla 509W), con sistema FPV tutto compreso (con sigla 509G), senza sistema FPV ma con videocamera (con sigla 509V) e senza sistema FPV e senza videocamera (con sigla 509 ma più difficile da reperire). In questa guida ci occuperemo solo della variante 509W, ma molto di quanto riportato vale anche per le altre.
Hai appena ricevuto e sconfezionato il tuo quadricottero e ti senti un po' indeciso sui primi passi da compiere, magari perché non hai mai fatto volare prima qualcosa di simile? In questa pagina trovi una semplice guida per imparare a pilotare il tuo nuovo drone e qualche consiglio offerto da chi ha già maturato un po' di esperienza su questo modello.
Per prima cosa tieni presente che:
- questi piccoli droni non sono "giocattoli" anche se sono venduti come tali, quindi è consigliata un'età minima di 14 anni e la presenza di un adulto
- il drone può rappresentare un pericolo se si vola alla presenza di persone, animali e ostacoli (piante o altro)
- non volare mai sotto la pioggia, con vento superiore a quello tollerato dal tuo modello e con temperature estreme (né troppo freddo, né troppo caldo)
- rimuovi le batterie dal drone e dal radiocomando se ritieni di non utilizzarli per tempi prolungati
Innanzitutto una rassicurazione: il JXD 509W è più solido di quanto possa sembrare ad una prima occhiata ed anche la sua leggerezza, che all'apparenza potrebbe risultare quasi un difetto, è in realtà un vantaggio perché gli consente di attutire e meglio resistere agli inevitabili urti a cui potrà essere sottoposto. Detto questo, inizia con l'estrarre la batteria Li-Po dal suo alloggiamento e mettila in carica finché il led dell'adattatore usb in dotazione da spento non diventa rosso fisso (per una batteria completamente scarica questa operazione potrebbe durare fino a 90 minuti, in seguito dipende dal livello di carica residuo dopo l'ultimo utilizzo). Mentre attendi ti consiglio vivamente di leggere l'articolo "Batterie Li-Po: storia e avvertenze" perché questi componenti possono risultare pericolosi se gestiti in maniera inappropriata.

Al termine della carica (ricorda: mai caricare la batteria del drone mantenendola all'interno del quadricottero) rialloggiala nella sua sede e collega il relativo connettore alla specifica presa (attenzione: essendo lo spinotto particolarmente ingombrante verifica che i fili non rimangano schiacciati tra la scocca e il coperchio che chiude l'alloggiamento della batteria).
Il modello dovrebbe esserti giunto preassemblato, ad esclusione del montaggio dei paraeliche. Per fissare i paraeliche (che sono diversi per eliche di tipo A e di tipo B, fai dunque attenzione che la lettera prestampata sotto l'elica e sopra il relativo paraelica corrispondano) devi semplicemente posizionare ogni paraelica, premerla nella sua sede e avvitarla con il cacciavite più piccolo con una delle viti più sottili che trovi nell'apposito sacchetto (al termine della procedura alcune viti rimarranno di scorta) fino in fondo ma senza sforzare per evitare la rottura dell'attacco interno della scocca che è in plastica) facendo attenzione, una volta fissato il tutto, che le punte delle eliche in fase di rotazione non entrino in contato con essi. Ti consiglio anche di fare ruotare le eliche, una per volta, per una decina di giri completi con il drone sia in posizione orizzontale standard che ruotato sottosopra per consentire la fuoriuscita dai blocchi del motore di eventuali residui di plastica derivanti dalle fasi di lavorazione e assemblaggio del modello. Nel radiocomando è invece necessario inserire quattro pile stilo tipo AA, non fornite di serie, meglio se alkaline (non ricaricabili perché il voltaggio complessivo deve essere di 6 volt) e naturalmente identiche tra loro e a pari livello di carica.

Per volare in FPV (FPV = trasmissione del segnale video dal drone al radiocomando per consentire una guida come se ci si trovasse a bordo) dovrai anche agganciare al radiocomando il tuo smartphone. Per fare questo inizia a collegare il supporto che hai trovato nella confezione e avvitalo con il cacciavite più grande con due delle viti più larghe che trovi nell'apposito sacchetto, quindi alza la prolunga e posizionaci orizzontalmente il telefono e poi lascia che questa ridiscenda facendo l'opportuna pressione per tenerlo fissato (è un sistema equivalente ai portacellulari o porta navigatori universali per le automobili). Attenzione: la sua corsa e di conseguenza la larghezza massima dello smartphone è limitata e varia da un minimo di 5 ad un massimo di 6,5 cm, inoltre considera che il supporto è inclinabile per un'escursione totale di circa 50 gradi.
Infine ricorda che batterie in esaurimento possono comportare la perdita di contatto con il velivolo e la conseguente discesa verticale incontrollabile dello stesso (il JXD 509W, se non localizza più un contatto con il radiocomando, inizia a fare lampeggiare le luci di bordo e dopo circa 4 secondi scende perpendicolarmente a terra). Purtroppo il radiocomando non dispone di un sistema per segnalare il livello di carica residuo delle sue batterie, ma batterie in esaurimento (del drone o del radiocomando) possono essere avvertite poiché viene compromessa la reattività dei comandi e diminuisce il raggio di controllo. Inoltre sul drone le luci di bordo iniziano a lampeggiare già a circa metà carica, e prima che la sua batteria raggiunga un livello di carica insufficiente un sintomo inequivocabile è la difficoltà a mantenere la quota di altitudine.
Leggi l'articolo "Batterie Li-Po: storia e avvertenze" mentre attendi il caricamento della batteria in dotazione.
Introduzione sul sistema di volo dei droni

I quadrimotori sono tipi di piccoli droni facili da pilotare per chi non ha mai avuto esperienze precedenti, ma ci sono alcune piccole regole da tenere bene presente soprattutto su modelli "di base" come il JXD 509W.
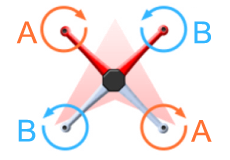
Innanzitutto se non si attiva il sistema FPV (trasmissione del segnale video dal velivolo al radiocomando per consentire una guida come se ci si trovasse a bordo) e la modalità di volo headless (vedi oltre in questo articolo), bisogna sempre avere la certezza del senso di direzione (orientamento) che sta tenendo il drone in volo poiché, quando si muove con la parte anteriore rivolta verso di noi, alcuni comandi vanno impostati al contrario (effetto specchio): per esempio per andare a destra è necessario dare il comando "vai a sinistra", e viceversa. Quindi è importante ricordarsi che i led azzurri indicano la parte anteriore del velivolo, i led bianchi ne indicano invece la parte posteriore. Inoltre questo modello (definibile come il ricevitore) è particolarmente leggero e non pone grossa resistenza alle correnti d'aria (la situazione migliora alla massima potenza). Ciò comporta che un colpo di vento può allontanarlo da noi e il contatto con il radiocomando (definibile come il trasmettitore) può interrompersi facendolo scendere a terra in maniera incontrollata (i modelli più evoluti dispongono invece di una vera funzione automatica di "ritorno automatico" nel caso di mancanza di segnale), così come la precisione della funzione semplificata di "ritorno automatico" (vedi oltre in questo articolo) prevista sul JXD 509W è fortemente influenzata dalle correnti d'aria.
Anche le eliche richiedono un'attenzione particolare: oltre ad essere asimmetriche (destre o sinistre sono riconoscibili dalla lettera prestampata in rilievo nella parte inferiore) con la conseguenza che in caso di sostituzione non sono intercambiabili, è importante evidenziare che durante la rotazione raggiungono un buon numero di giri e possono risultare taglienti. Per questa ragione non solo si raccomanda di adottare sempre i paraeliche a corredo (facendo attenzione che dopo urti o cadute non risultino piegati e di conseguenza che le punte delle eliche vadano ad urtarli quando entrano in rotazione), ma anche che durante tutte le operazioni di manutenzione e preparazione il velivolo sia spento (l'interruttore è posto in prossimità del vano batteria) e la batteria sia scollegata (rimuovendo nel vano batteria l'apposito connettore dalla relativa presa).
Infine, per i primi voli è meglio disporre di uno spazio sufficientemente ampio (meglio se con base in erba) o, se i test vengono eseguiti all'interno (sconsigliato per chi non ha alcuna esperienza precedente), con pavimentazione appositamente "ammorbidita" (coperte o materassini) e solo a bassa velocità (vedi oltre in questo articolo). Sposta verso il basso (ma non completamente per evitare una caduta verticale) lo stick del gas (vedi oltre in questo articolo) in caso di perdita di controllo del velivolo o in situazione di panico, così da riportarlo delicatamente a terra, quindi porta la leva in basso a fondo corsa per arrestare la rotazione delle eliche.
I primi voli sono ad alto rischio di crash. Per riportare il drone delicatamente a terra in caso di panico, o per arrestare la rotazione delle eliche, rilascia progressivamente lo stick del gas fino a fondo corsa.
Radiocomando

In ambito modellistico esistono radiocomandi funzionanti in 4 modalità che si differenziano principalmente per le funzioni associate alle due leve (stick) di comando, ma il JXD 509W può essere acquistato solo con funzionamento in modo 2 (il più diffuso e consigliato). I due stick del radiocomando hanno inoltre una preimpostazione meccanica differente rispetto agli altri droni di pari categoria: essendo questo modello dotato di un sensore di pressione dell'aria ad alta densità che consente di mantenere automaticamente la quota, sia lo stick di sinistra che quello di destra sono autocentranti in entrambe le direzioni (negli altri modelli invece di solito lo stick di sinistra è autocentrante orizzontalmente ma libero verticalmente).
I comandi principali per il pilotaggio che si possono impartire al nostro multirotore sono solo quattro:
- Gas o quota (in inglese throttle), che consiste nel fare alzare (o abbassare) verticalmente il drone se questo è in posizione perfettamente orizzontale, oppure di aumentare (o diminuire) la velocità dell'operazione corrente di beccheggio, rollio o imbardata. Tale funzione si attiva spingendo in avanti lo stick di sinistra (rilasciandolo tornerà automaticamente in posizione centrale e il drone tenderà a mantenere la quota impostata con uno scarto di 20/30 cm). Tecnicamente questa operazione comporta un aumento (o diminuzione) simultaneo della velocità di rotazione di tutti i motori. Per fermare la rotazione delle eliche premi il bottone START/STOP posto nella parte inferiore sinistra sul radiocomando o, se il drone non è in volo, abbassare simultaneamente e sposta completamente a sinistra la leva di sinistra e abbassa e sposta tutto a destra la leva di destra. Logicamente questa operazione è la prima che va effettuata per portare in sospensione il drone e, per contro, è l'ultima da effettuare (portando lo stick verso il basso possibilmente senza associare simultaneamente movimenti di beccheggio, rollio o imbardata) per l'atterraggio.

- Beccheggio (in inglese pitch), che consiste nel fare avanzare (o indietreggiare) il drone. Tale funzione si attiva spingendo in avanti lo stick di destra (lasciandolo andare tornerà automaticamente in posizione centrale fermando l'avanzamento del drone). Tecnicamente questa operazione comporta una riduzione della velocità di rotazione dei motori anteriori ed un aumento a quelli posteriori costringendo il drone ad inclinarsi, con conseguente movimento indotto dalla posizione obliqua assunta dal velivolo. Logicamente questa operazione non va effettuata con il drone a terra ma solo se questo è in sospensione. Naturalmente spostando lo stick di destra verso il basso la funzione è invertita e il drone arretrerà.
- Rollio (in inglese roll), che consiste nel fare muovere orizzontalmente il drone ma senza ruotare il suo senso di orientamento (se ad esempio la telecamera sta puntando verso nord, il drone si muoverà verso est o verso ovest continuando a puntare verso nord). Tale funzione si attiva spingendo verso destra (o verso sinistra) lo stick di destra (lasciandolo andare tornerà automaticamente in posizione centrale fermando il movimento orizzontale del drone). Tecnicamente questa operazione comporta una riduzione della velocità di rotazione dei motori destri (o sinistri) ed un aumento a quelli sinistri (o destri) costringendo il drone ad inclinarsi, con conseguente movimento indotto dalla posizione obliqua assunta dal velivolo. Logicamente questa operazione non va effettuata con il drone a terra ma solo se questo è in sospensione.
- Imbardata (in inglese yaw), che consiste nel fare ruotare su se stesso il drone, e conseguentemente da questo momento il rollio potrebbe richiedere la funzione "specchio" (a meno che non si sia attivata la modalità headless) per cui per muoversi orizzontalmente verso destra sarà necessario attivare il rollio verso sinistra, e viceversa. Con il drone in imbardata la guida diventa meno intuitiva e l'abilità del pilota diventa essenziale. Tale funzione si attiva spingendo verso destra (o verso sinistra) lo stick di sinistra (lasciandolo andare tornerà automaticamente in posizione centrale fermando la rotazione su se stesso del drone). Tecnicamente questa operazione comporta una riduzione incrociata della velocità di rotazione dei motori. Logicamente questa operazione non va effettuata con il drone a terra ma solo se questo è in sospensione.
Beccheggio, rollio e imbardata non vanno effettuati con il drone ancora a terra, e nemmeno durante l'ultimo istante prima dell'atterraggio.
Pronti alla partenza (e poi all'atterraggio)
Ora hai la sufficiente infarinatura per potere accendere i motori e volare con l'ausilio del radiocomando in dotazione! Posiziona il velivolo su una superficie piana (altrimenti la connessione tra il radiocomando e il drone non si instaurerà), alimenta il 509W spostando la levetta nera posta vicino al vano batteria e i led a bordo inizieranno a lampeggiare velocemente, accendi il radiocomando premendo il bottone POWER posizionato nel centro tra i due stick e sentirai un doppio beep (i led in alto inizieranno a lampeggiare), quindi muovi la leva del gas (lo stick di sinistra) alzandola completamente (sentirai un beep prolungato e i led sul drone inizieranno a lampeggiare lentamente) e poi abbassandola completamente (sentirai un beep, i led sul radiocomando e quelli sul drone diverranno tutti accessi fissi),infine premi il bottone START/STOP posto nella parte inferiore sinistra sul radiocomando ed il drone è pronto per il decollo (le luci di bordo diventeranno tutte accese fisse). Ricorda che per arrestare la rotazione delle eliche puoi a drone in volo ripremere lo stesso bottone, o a drone a terra abbassare simultaneamente e spostare completamente a sinistra la leva di sinistra e abbassare e spostare tutto a destra la leva di destra.
Ora puoi dare un po' di gas (alzando lo stick di sinistra) per vedere il tuo quadricottero sollevarsi da terra.
In questa prima fase ti consiglio di fare pratica posizionandoti dietro al drone (con la "coda" rivolta verso di te) e muovendo lo stick del gas accelera e rilascialo facendo compiere solo piccoli balzi in verticale al multirotore e ottenere automaticamente quelli che in inglese sono una serie di hovering, cioè il velivolo rimarrà stabilmente in sospensione (con una tolleranza di 20/30 cm). Portalo quindi ad un paio di metri, verifica che (con assenza di vento) esso rimanga stabilmente fermo senza "tirare" da una parte, diversamente dovrai regolare, premendo una o più volte degli appositi bottoni, la posizione "neutra" del drone (vedi oltre). Esercitati quindi essenzialmente a decollare e ad atterrare dolcemente.
Attenzione: se dopo un atterraggio "rovinoso" la stabilità del drone sembra compromessa, prova ad effettuare una operazione di reset (vedi alla voce "Funzioni speciali" più avanti in questo articolo).

Se il drone in hovering sembra "tirare" da una parte, opera come segue:
- se il drone tende a sollevarsi/abbassarsi di quota prova a premere una o più volte in giù/su il bottone (trim) a destra dello stick di sinistra sul radiocomando fino ad eliminare le oscillazioni
- se il drone tende a muoversi in avanti/indietro prova a premere una o più volte in giù/su il bottone (trim) a sinistra dello stick di destra sul radiocomando fino ad eliminare le oscillazioni
- se il drone tende a muoversi verso destra/sinistra prova a premere una o più volte verso sinistra/destra il bottone (trim) presente sotto lo stick di destra sul radiocomando fino ad eliminare le oscillazioni
- se il drone tende a ruotare su se stesso verso destra/sinistra prova a premere una o più volte verso sinistra/destra il bottone (trim) presente sotto lo stick di sinistra sul radiocomando fino a fermare la rotazione
Quando ritieni di avere ottenuto un controllo di hovering soddisfacente, puoi iniziare a fare compiere al drone i primi movimenti in avanti e indietro (leva di destra in avanti e indietro), verso destra e sinistra (leva di destra verso destra e sinistra) a diverse velocità (leva del gas in avanti e indietro), ma sempre mantenendo l'orientamento di partenza del drone con la "coda" rivolta verso di te. Allenati disegnando quadrati e cerchi in senso orario e antiorario mantenendo sempre la stessa altezza da terra.
Se invece vuoi iniziare a "complicarti la vita" passa ad esercitarti nelle imbardate: mantenendo in sospensione il drone, agisci muovendo verso destra o sinistra lo stick di sinistra per fare ruotare su se stesso il tuo quadricottero. Quando la sua posizione risulterà ruotata di 180 gradi (telecamera rivolta completamente verso di te) ti apparirà molto chiara la funzione "specchio" che dovrai adottare per muoverti orizzontalmente: un comando di rollio verso destra sarà eseguito verso sinistra, e viceversa. Se vuoi raggiungere una buona capacità di pilotaggio è necessario adattare la tua menta a questa visione capovolta. Naturalmente per posizioni di orientamento intermedie l'adattamento richiede sforzi ancora maggiori (puoi provare ad aiutarti ruotando te stesso di un angolo simile).
L'esercizio successivo (da esame) è quello di effettuare a mezz'aria delle figure a forma di 8 in cui il "muso" del drone deve sempre essere rivolto verso la direzione della figura come se fosse la punta della matita che segue il percorso necessario per disegnarlo. Se riesci in questa non semplice sequenza di comandi incrociati (sia in senso orario che antiorario), sei già diventato sufficientemente esperto per riportare a casa il tuo drone anche in caso di imprevisti (ma attento sempre agli alberi e alle improvvise folate di vento!).
Alla fine, dopo l'atterraggio, ricordati di spegnere sempre prima il radiocomando (le luci del drone inizieranno a lampeggiare), e in seguito il drone. E’ molto importante rispettare questa sequenza.
Attento alle imbardate: se non attivi la modalità headless la tua mente dovrà lavorare come difronte ad uno specchio.
Filmati e fotografie

Come molti altri modelli, anche il JXD 509W dispone di una discreta camera per la guida FPV montata sotto la scocca inclinabile manualmente da circa -5 a -30 gradi e con possibilità di registrazione di filmati e fotografie sulla memoria del tuo smartphone (se collegato) con comandi impostabili dal radiocomando o dallo stesso smartphone.
Quindi durante le fasi di volo è possibile attivare/interrompere la registrazione di filmati in risoluzione 720x576 (senza audio) e/o scattare fotografie alla risoluzione di 720x576 pixel (96dpi 24bit). Per una migliore qualità delle immagini si consiglia di operare solo in bassa velocità (vedi più avanti in questo articolo) e con una buona illuminazione (evitare alba, crepuscolo, sera e naturalmente notte).
Per attivare la registrazione di un filmato premi il bottone VIDEO posto nella parte inferiore destra sul radiocomando. Quest'ultimo emetterà un beep prolungato.

Per fermare la registrazione di un filmato premi nuovamente il bottone VIDEO posto nella parte inferiore destra sul radiocomando. Quest'ultimo emetterà nuovamente un beep prolungato. Attenzione: è necessario interrompere sempre la registrazione prima di spegnere il drone o il filmato in corso non verrà memorizzato.
Per scattare una fotografia premi il bottone PHOTO posto nella parte inferiore destra sul radiocomando. Quest'ultimo emetterà un beep.
Attenzione: video e foto sono memorizzabili solo sulla memoria dello smartphone (se collegato).
Se non si ha intenzione di registrare filmati o fotografie, di volare in FPV o di comandare il drone da smartphone, staccando la camera dal drone sarà possibile aumentarne leggermente l'autonomia di volo.
Funzioni speciali
Il radiocomando permette di comandare il drone a tre velocità agendo ripetutamente sul bottone posto sull'angolo superiore sinistro (in costa): la velocità di movimento del drone passa da bassa (sentirai simultaneamente un beep) adatta per principianti o per garantire migliori riprese di filmati e fotografie, a media (sentirai simultaneamente due beep) e ad alta (sentirai simultaneamente tre beep) per piloti esperti e evoluzioni avanzate.

Sempre sul radiocomando ma nella parte inferiore sinistra è presente il bottone LIGHT che comandare lo spegnimento di tutti i led a bordo del drone (un beep ci avviserà dell'avvenuta operazione). Una seconda presione li riattiverà (sempre con un beep di avviso).
Se la distanza da terra del drone è di almeno un metro e mezzo (distanza minima di sicurezza da valutare visivamente poiché non è presente alcun strumento automatico di controllo), premendo il bottone posizionato sull'angolo superiore destro del radiocomando (in costa) si inizierà a sentire un beep continuato: a questo punto agendo sullo stick di destra nella direzione desiderata è possibile fare effettuare al drone una acrobazia aerea automatica (360 gradi), purché sia presente abbastanza carica nella sua batteria. Per ogni acrobazia è necessario premere prima il suddetto bottone. Si può ripremere lo stesso bottone per non attivare alcuna acrobazia (il beep continuato cesserà per indicare il ritorno al normale stato di volo). Il drone può rovinare a terra e riportare seri danni se il comando viene azionato ad una quota inferiore a quella minima indicata.
E’ possibile attivare la modalità headless che consente di pilotare il drone continuando il movimento avanti/indietro/destra/sinistra indipendentemente dalla rotazione (imbardata) assunta dal drone (evitando così per esempio che il rollio richieda la funzione a "specchio" per cui essendo ruotato di 180° per muoversi orizzontalmente verso destra sia necessario attivare il rollio verso sinistra, e viceversa) rendendo la guida decisamente più facilitata. Premi il bottone HEADLESS MODE posto nella parte inferiore destra sul radiocomando per attivare la modalità headless (sentirai anche un beep e le luci sul drone diventeranno lampeggianti). Ripremi lo stesso bottone per tornare allo stato normale (le luci sul drone smetteranno di lampeggiare e sentirai nuovamente un beep dal radiocomando).
E’ possibile attivare la funzione di ritorno automatico che impone al drone di ritornare indietro verso l'operatore premendo il bottone A KEY RETURN posto nella parte inferiore destra sul radiocomando (inizierai a sentire un beep intermittente). Non essendo il sistema di volo dotato di GPS, il punto "calcolato" di ritorno è piuttosto approssimativo e soprattutto sarà tanto più impreciso quanto il vento avrà "disturbato" il drone durante il suo normale volo. Ripremi lo stesso bottone o torna a muovere lo stick di destra per interrompere tale funzione (il beep intermittente cesserà).

Dopo un atterraggio "rovinoso", o se la stabilità del drone sembra compromessa, puoi effettuare una operazione di reset seguendo questi passi:
- posiziona il drone su una superficie piana
- esegui la normale procedura di avvio come già descritto in precedenza (in sintesi: accendi prima il drone, accendi il radiocomando, muovi la leva del gas alzandola e poi abbassandola completamente e attendi che i led sul drone e sul radiocomando siano accesi fissi)
- mantieni simultaneamente la leva di sinistra nella posizione massima inferiore e destra e la leva di destra nella posizione massima inferiore e sinistra fino a quando le luci sul drone smetteranno di lampeggiare e torneranno fisse (simultaneamente il radiocomando emetterà un beep prolungato)
- dai gas per tornare a volare
Ora sai tutto quello di importante che è necessario conoscere per pilotare al meglio il tuo JXD 509W. Buon divertimento!
Se il quadricottero si comporta in maniera anomala, può essere sufficiente eseguire un reset tramite l'apposita procedura.

Controllo del volo da smartphone

Questo modello nella variante 509W con sistema FPV basato su smartphone contiene nella confezione una miniguida al software di controllo che può essere installato su piattaforma IOS e Android (cerca Exploration UFO software o accedi tramite i QR code su essa stampati).
Questa miniguida (fornita anche in allegato in fondo a questa pagina) è disponibile nelle lingue inglese e cinese.
Se hai apprezzato la nostra guida al volo, valuta la possibilità di fare una piccola donazione a sostegno e supporto di questo sito.
Scopri qui perchè farlo.
Il JXD 509W utilizzato per realizzare questa guida è stato cortesemente fornito da GearBest al fine di potere offrire ai nostri visitatori una valutazione equa e non di parte.
Si ringrazia vivamente questo venditore per la sua disponibilità, la correttezza e la professionalità dimostrata.
Questo è il link del prodotto con FPV basato su smartphone: JXD 509W
Questo è il link del prodotto con FPV tutto compreso: JXD 509G
Questo è il link del prodotto senza FPV ma con videocamera: JXD 509V
| [Manuale in inglese] | 423 kB |


 Hai riscontrato un link non valido o errori e inesattezze nella pagina?
Hai riscontrato un link non valido o errori e inesattezze nella pagina?